|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

|
|
|
|
|
|
|
|
|
|
|
|
|
FunJet mit Schubvektorsteuerung
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ab Oktober 2006
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Der Funjet von Mulitplex ist "das" Fertigmodell der Saison 2006 wie ich finde. Alle Teile passen sehr gut zusammen, so
dass der Aufbau ein Kinderspiel
ist. Die Flugeigenschaften sind herausragend. Selbst stärkerer Wind lässt das Modell
ruhig fliegen. Mein Modell wurde für die Modellbaumesse in Leipzig
im Oktober 2006 extra leicht gebaut und ausgerüstet.
Mit einem leichten Zweizeller Lipo und dem günstigen GWS Motor (Motor + Regler-Set 39€) wiegt es nur
310g. Das ist
genau die Hälfte des angegebenen Fluggewichtes. Damit haben wir uns auf der Messe mit dem Konstrukteur von MPX
einen Spass erlaubt, wie das denn
wohl sein kann... Als wir mit bis zu fünf Funjets gleichzeitig in der größeren Halle geflogen
sind, kam die MPX - Crew aus dem Staunen nicht mehr heraus. Dank
Elapor verzeiht das Modell auch mittelschwere Abstürze
bzw. ist schnell wieder repariert.
Eine Besonderheit ist der Funjet mit Schubvektorsteuerung. Das heißt der ganze Motor ist schwenkbar gelagert. Angesteuert
wird diese Mechanik von
zwei weiteren Servos im Rumpf. Von einem Video begeistert, baute ich auch eine Schubvektormechanik
in meinen Funjet ein. Da die originale Plastikdüse zur
Motorbefestigung etwa 23g wiegt, war dieses fast ohne Mehrgewicht
möglich. Die ersten Probeläufe mit der ersten Version, unten aufgehängt, und oben rechts und links
angelenkt (im Rumpf
über mechanischen Mischer, da zu faul zum Programmieren... ;) waren ernüchternd. Entweder schwingt sich die ganze
Mechanik auf oder der
Ausschlag reicht nicht aus. Abhilfe schaffte da erst eine komplett neue Konstruktion der Mechanik.
Allgemein benötigt man etwa min. 30 Grad Ausschläge in alle
Richtungen, um verrückte Flugmanöver fliegen zu können.
|
|
|
|
|

|
|
|
|
|
|
|
|
|
Mein Funjet hat einige LEDs bekommen, außen in den Randbögen sind Rainbow-LEDs verbaut. Bei Tageslicht passt sich
der Funjet optisch den anderen
Modellen an...
|
|
|
|
|
|
|

|
|
|
|
|
|
|
|
|
|

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
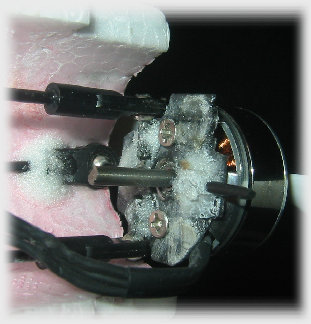
Links die Mechanik des Vorbildes, rechts mein erster Versuch. Die Mechanik ist unten gelagert, wird oben zwischen zwei
Holzstücken geführt und
rechts und links mit zwei Schubstangen abgelenkt. Über Mischer (mechanisch oder programmiert)
werden die Steuerfunktionen passend eingestellt.
Probleme waren entweder Spiel durch das Servo oder zu kleine Ausschläge.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

|
|
|
|
|
|
|
|

|
|
|
|
|
|
|
|

|
|
|
|
|
|
|
|
|

|
|
|
|
|
|
|
Die neue, völlig anders aufgebaute Mechanik ermöglicht große Ausschläge in alle Richtungen. Durch die mittigen Lagerungen gehen
nun die
Schubkräfte des Motor nicht mehr direkt auf die Servos. Eine Mischung der Funktionen entfällt, die Ausschläge sind einfacher
zu programmieren. Der Ring wurde aus
CFK Rovings um eine passende Form gebaut. Die Wellen sind aus 2mm CFK Stäben, die in Bowdenzugröhrchen
gelagert sind.
|
|
|
|
|
|
|
|

|
|
|
|
|
|
|
Es empfiehlt sich die Steuerfunktionen über einen Schalter abschaltbar
zu gestalten. Das kann je nach Sender über Flugphasen oder abschaltbare
Mischer oder Dual Rate für das "Seitenruder" gelöst werden. So
hat man einen normal fliegenden Funjet, der per Schalterklick
unglaubliche Flugmanöver
ermöglicht. Am Anfang ist es besser,
in größerer Höhe die Wirkung auszubrobieren. Dadurch dass
keine Strömung anliegt, benötigt das Modell viel Höhe um sich
abzufangen!
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Nachbrenner mit LEDs im Rumpf
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

|
|
|
|
|
|
|
|
|
|
Updates bis 2022:
Es wurde ein kleiner und deutlich leichterer 35 A BLHeli Copter ESC eingebaut, zudem ein 5" Copter Propeller. So hat man
zwar gegenüber einer Cam Speed
ein bisschen weniger Topspeed aber deutlich mehr Standschub. Der Motor ist nun ein
T-Motor V2306.5 V2.0, 2550kv, diesen gibt/gab es für 13,90 € in D. Da
kann man nicht meckern... ;) Der Akku ist ein 4s Lipo
mit 1.300 mAh. Der Schub hilft in der einen oder anderen Situation mit Vector ganz gut. Die Steuerung
wurde auf "nur" Seite
umgebaut, es zeigte sich, dass Überschläge auf Höhe und Tiefe eher dem Zufall überlassen waren, statt präzise steuerbar
zu sein.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

|
|
|
|
|
|
|
|
|
|
|
|
|
|
Empfehlungen: Die Schubvektorsteuerung nicht zu tief benutzen, da doch recht viel Höhe verloren geht, eh sich der Funjet
wieder abfängt und steuern
lässt...! Und die Steuerung auf einen Schalter legen, und nur bei Bedarf einsetzen..
|